Robot Controllers Part 2: Raibert Hopper (with Dr. Christian Hubicki
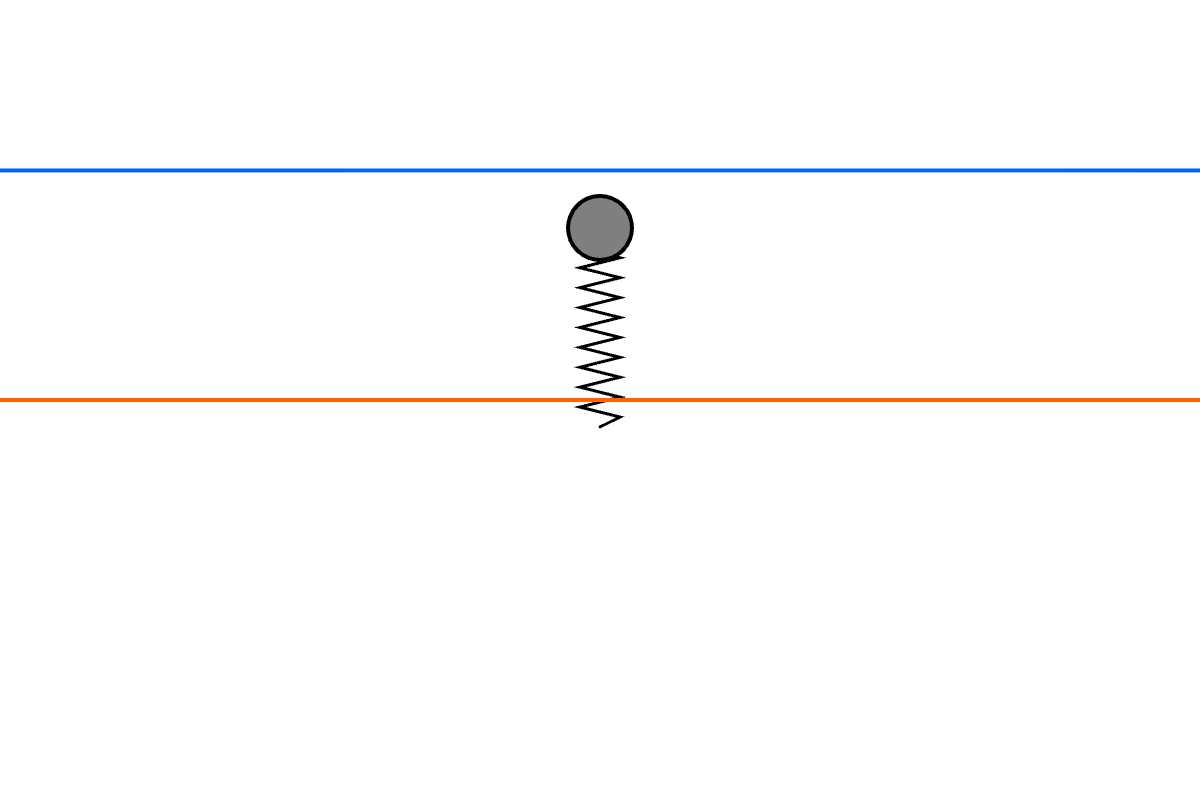
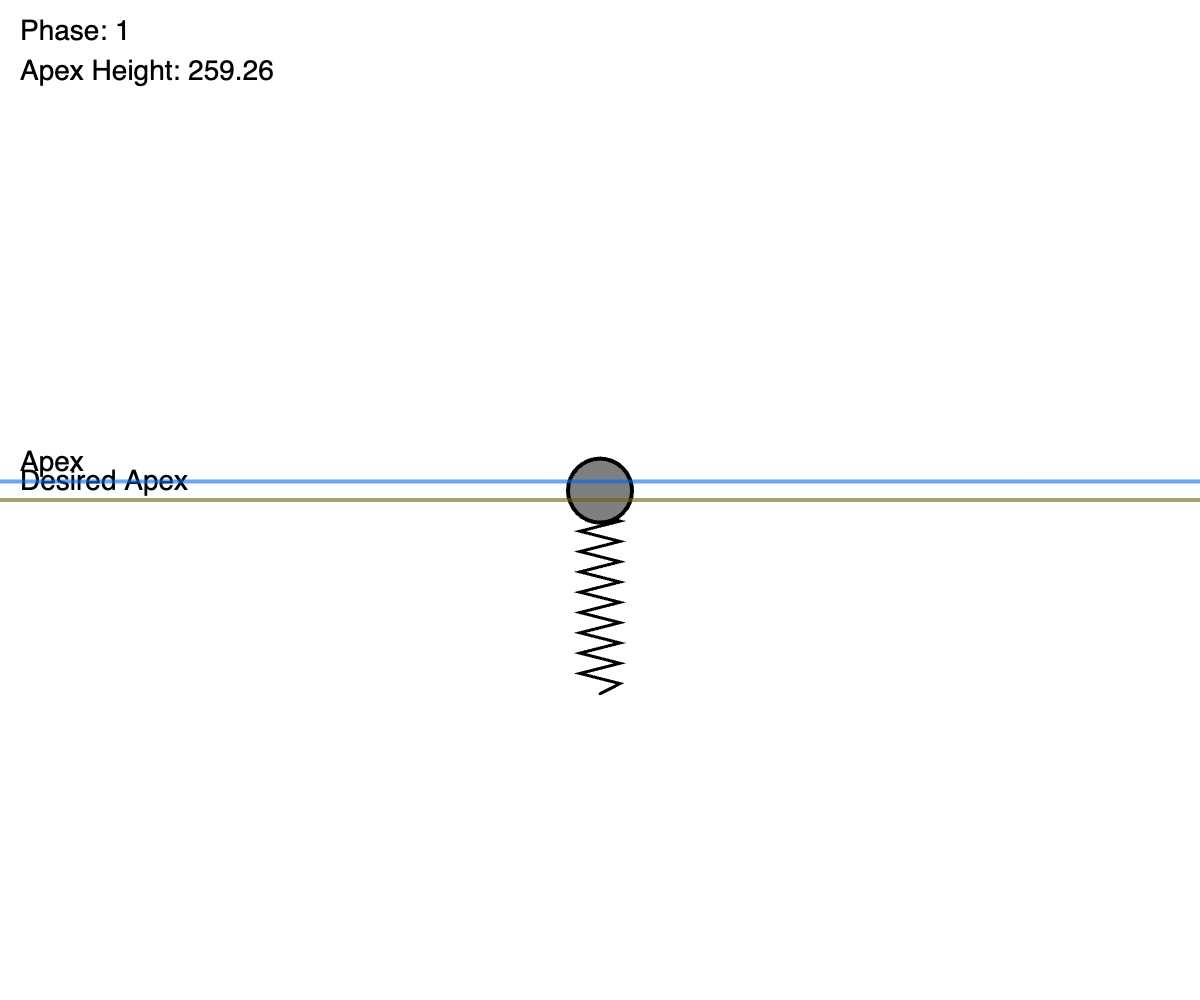





In this livestream, I'm rejoined by Dr. Christian Hubicki to continue our series on robot controllers. Dr. Hubicki gives a presentation on the history of legged robots (like ASIMO and Boston Dynamics) and the principles behind the Raibert Hopper. Then, we attempt to implement a ...
Dr. Hubicki's personal website.
The research group run by Dr. Christian Hubicki at the FAMU-FSU College of Engineering.
My book on simulating natural systems, which covers concepts like vectors, forces, and springs.
The first part of this series, where we coded a simulation of an inverted pendulum on a cart.
This video covers steering behaviors, which are algorithms for autonomous agents to navigate their environment.
This video covers scalar projection, used in the spring damping code.